PicoMMU is a PCB designed to control a stepper motor and servo for a multi-material unit. It is compatible with Klipper firmware.

- A USB C cable to connect to your RPI / Printer
- A 12-24V power supply
- A TMC2209 (BTT Recommended)
- A stepper motor crimped with a 4 pin JST XH B4
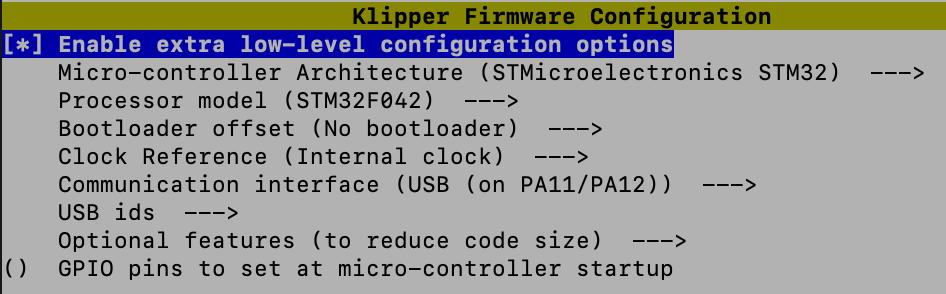
- Follow this Klipper guide on how to build the firmware. The first image shows the configuration settings and the second shows the "Optional Features" section.

- Once the firmware is build, put the chip into DFU mode by clicking the reset button while holding the boot button.
- Run lsusb and take not of the numbers in this format: xxxx:xxxx.
- Now use the following command to flash the firmware (replacing xxxx:xxxx with your MCU's ID):
make flash FLASH_DEVICE=xxxx:xxxx. - Unplug and replug in the USB cord and your MCU should pop up in
ls /dev/serial/by-id/*.
This project is licensed under the MIT License.